


無人機專題(六)/用無人機反擊科技帶來「不安全」的代價

文/陳建瑋、李秋容
在台灣,生活因科技而變得便利,但有些事情卻反而困難得「回不去」了。
數十年來,科技一步一腳印的累積、突破,這些後遺症也安靜地在沉澱,等待成熟、浮出水面的那一天:環境汙染、生態失衡、各領域供需失衡、隱私安全越界等「安全」議題像雨後春筍一樣越來越多、越來越嚴重、越來越緊急。
「科技造成的問題就用更新的科技來反擊吧。」站出來反擊的不是別人,而是一群學生,他們要用無人機反將這些「不安全」一軍。
來自南臺科大的學生團隊 Sky Sentry,利用自身開發的「飛行監控平台」讓近來擾人的無人機乖乖就範;而來自中央大學的 Ark Lab 多旋翼多坊團隊,則以「水汙監控無人機系統」和「雙塔計畫」試圖達成全台空氣和水質汙染的即時監控。
造飛機、造飛機,來到 101?
「無人機是否會造成安全問題」這個議題已經沸沸揚揚了好一陣子,光就去年來說,無人機便擦撞了台北 101、美國白宮、日本首相官邸與世界文化遺產姬路城,並且差點擊中正在參加高山滑雪世界盃競賽的選手,「這只是因為法規還不夠周全而已?」但問題並不是這麼簡單。
「問題出在連線的方式,無人機與控制器之間的連線就像紅外線或 Wi-Fi,以點對點的方式連接,一旦飛行超過連線距離,或是被建築物干擾訊號,無人機就會開始迷航。」團隊成員蔡博智說,在都市裡面更容易因為玻璃帷幕的反射,造成訊號混亂而失控。
求人不如求己-自己的「機」自己抓

Sky Sentry 認為要解決這個問題必須從「頭」開始。
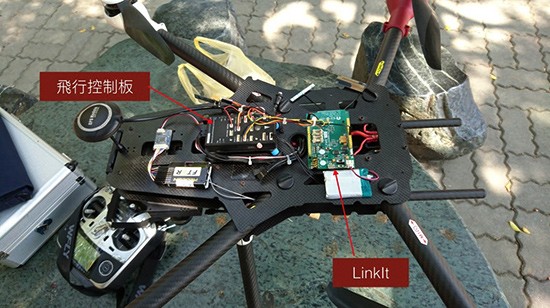
由南台科大電子工程系老師李志清領軍,團隊整合航太技術及系統、即時監控及無人機通訊與控制技術,讓無人機擁有跟手機一樣的訊號。透過 GPRS 或 3G 連線接上 Internet,即使短暫失聯,只要附近有基地台就可以恢復連線、找到回家的路。從這個概念出發,完成了這套國內首創的無人機飛行安全監控平台。
平台本身具有三個重點功能,首先是透過系統設定座標,將某些區域設定為禁航區,無人機便不能在區域內起飛或飛進此區域,以此避免撞建築物或飛進人群密集處造成安全隱憂。台灣政府若採用這套系統來管控全台的無人機,只要將機場、軍事禁區、建物密集區等高敏感地帶設定為禁航區,內建在雲端資料庫裡,只要無人機連上這個資料庫便能辨識出禁航區的位置,就可以輕鬆減少誤闖禁區的意外。
其二是設置電子圍籬,限定無人機只能在某一個範圍內飛行,一旦飛出這個範圍,就會強制返航,如此便能解決迷航亂飛的問題。電子圍籬非常適合新手們試飛,也很適合開發者實驗新機器,只要碰觸到電子圍籬的訊號範圍,無人機就會收到返航訊號,接著拉升高度後,返航並自動降落到指定的位置。
最後,萬一無人機迷航或墜落在視線外,也可以透過這個平台尋找,只要透過內建開發板 LinkIt ONE上的 GPS、GPRS 和藍芽訊號,就能夠幫助使用者找回無人機。LinkIt ONE 內建的 GPRS 可以直接連網回報位置,若是掉落在沒有基地台的地方,也可以透過藍牙訊號慢慢逼近位置,縮小搜索範圍。
河川髒了怎知道?無人機來打小報告
《看見台灣》的空拍鏡頭帶我們看見了河川「繽紛燦爛」的悲鳴,《穹頂之下》的懸浮粒子 PM 2.5 讓我們知道「呼吸」不再是那樣的理所當然與純淨。相較於橫衝直撞的冒失無人機,河川汙染所帶來的安全問題卻是悄然無聲。
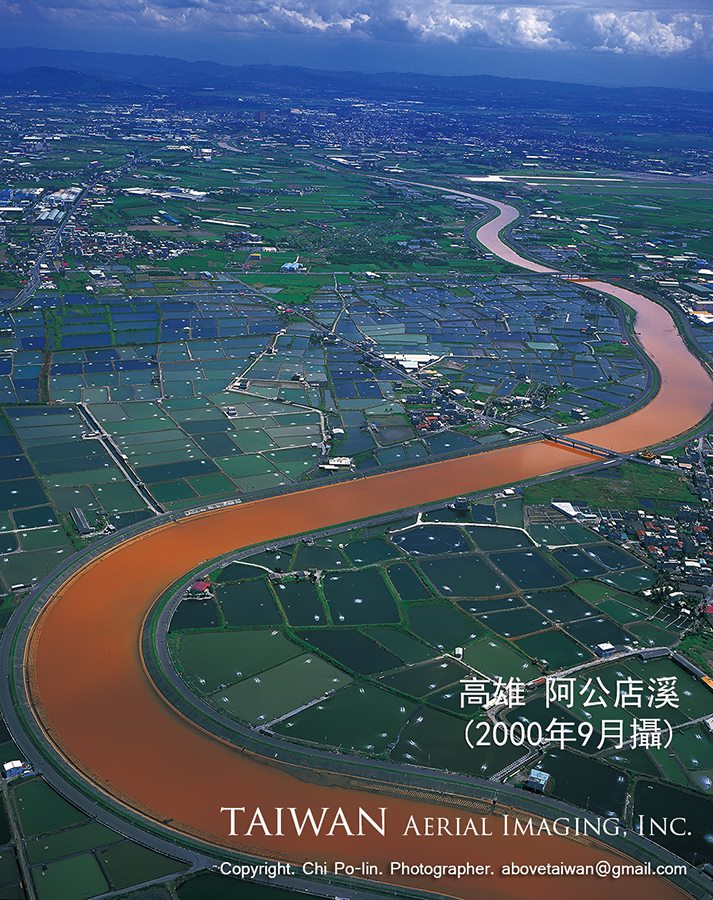
根據行政院環保署 2005 年環境水質監測年報指出,在台灣全長 2904.2 公里的流域中,受污染的比例已高達 64.2%。「汙染率這麼高?為何我們卻都不知道?」人力不足,以致於無法即時回報,是掌控汙染狀況的一大致命傷,傳統的人力勘查不但費時費力,更追不上時時刻刻都在變化的河川。
當時還是大學生的 Ark Lab 多旋翼工坊創辦人張東琳,便透過無人機、開放硬體和 GSM 網路串連製作出整合型監控平台。此平台可迅速計算河川之涵容能力,並能即時比對各集流分區之容許污染排放,滿足第一階段所需之調查作業,作為制定高階管理辦法之有力參考。

機體部分,他們將無人機裝上防水浮筒讓其可以停留於水面上進行檢測作業;機上安裝的水質感測模組則具有類比訊號擷取、長距離無線通訊的能力,透過 LinkIt ONE 類比輸入腳位,系統能夠讀取水溫、pH 值和電導度值等河川資訊;而監控平面則結合了 Google Earth 的地球三維模型,讓監測器回傳的即時資料可能定位於地圖中。除此之外,無人機的空拍強項也為監測注入新的視野,以第一視角拍攝的水色畫面則能夠用以之後進一步的追蹤。(延伸閱讀:【LinkIt ONE要怎麼玩】遠端自動化水質監控無人機系統)
「雙塔計畫」-讓 PM 2.5 無所遁形

「水汙監控無人機系統」讓 Ark Lab 團隊發現到 LinkIt ONE 開發板與通訊及 GPS 系統的高度整合性所帶來的可能性,「唯有與無人飛行器結合後有額外價值的專題才值得發展」,秉持著這樣的信念,加上空氣汙染的強勢肆虐,「雙塔計畫」便順勢而生。
延伸無人飛行器探測的高易達性與無人為操控危險的優點,他們將模組化無人飛行器更換監測儀器與通訊設備,並由 LASS(Location Aware Sensor System)提供環境感測器,檢測自富貴塔至鵝鑾鼻燈雙塔間的空氣污染狀況。面對如此長距離的飛行考驗,團隊表示他們將視無人機的飛行能力來決定進行點對點、或是接力式的直飛,而這一路都會搭配 4G 網路進行即時通訊。
安全保衛戰,怎能少你一份?
其實,想加入「改變」的團隊並不難,只要有一台無人機就可以。

Sky Sentry 所開發的「飛行監控平台」雖才在 2015 年的世界通訊大賽物聯網及穿戴式組奪下冠軍,卻沒有因此而止步。團隊不但將與聯發科、工研院及工業局等單位進行後續研究合作,期望將該系統建置完善並商轉。還將 API 完全開放給無人機玩家和開發商,讓所有無人機(必須具備連接 internet 功能)使用者也能配合這個雲端判別系統與資料庫來確保安全。團隊本身也有提供包套式的服務,協助安裝 Linklt ONE 開發板。
而 Ark Lab 多旋翼工坊所執行的「雙塔計畫」,則是仰賴了大眾自建的環境感測網路系統 LASS,有興趣者只需要具備能與系統相容的感測器套件,便能利用 LASS 進行任何環境監測計畫。(延伸閱讀:【開源公益專案】LASS環境感測網路系統)而 LASS 本身其實就是一項開放硬體計畫,立志以公益和中立的立場成為每位「改變者」背後最堅強的後盾,更期待未來能夠模組化進入 Maker 教育體系開枝散葉,歡迎進入社群共同討論、建構一個不一定會是更好、但會更清楚、希望更安全的科技時代。
封面圖片來源:photo via Retinafunk @flickr, CC License








留言討論