


從自動駕駛車禍事件,看特斯拉與 Google 的自動駕駛技術差別在哪?

2016 年 5 月 7 日,發生了歷史上第一起與自動駕駛技術相關的死亡車禍,也是美國特斯拉(Tesla)自動駕駛運行 1.3 億英里(約 2 億公里)以來第一次的嚴重意外。
美國高速交通安全管理局(NHTSA)初步調查顯示,約書亞.布朗(Joshua Brown)當時開著號稱地表最安全的特斯拉 Model S 電動車經過佛羅里達州的威利斯頓市,精準來說,是「自動駕駛系統(autopilot)」開著車。一台大型貨車在 Model S 前方準備左轉,後者煞車不及,直接撞上貨車側面尾部,駕駛當場死亡。

一般來說,自動駕駛車的感應器會監測車輛間的距離以決定車速,根據特斯拉官方解釋,當時處於自動導航的 Model S,感應器把白色貨車車體和強光下的天空搞混了,因而沒有來得及剎車。
特斯拉在部落格對車禍表達遺憾的同時,也強調自動導航技術只是輔助功能,車主必須好好坐在駕駛座上,手不可離開方向盤,隨時準備接管和控制車輛的動向,為車輛的安全負責。如果方向盤和座椅上的壓力感應器偵測到駕駛沒按照規定,就會發出警報並進行減速。
車禍具體過程和責任歸屬的報告還未出爐前,又發生第二起與第三起疑似與特斯拉自動駕駛有關的車禍(Elon Musk 已宣告第二起車禍的 Model X 沒有開啟自動駕駛模式),特斯拉官方聲明不會放棄自動駕駛技術,但會更詳細教育用戶如何使用這項新技術。美國高速交通安全管理局已對特斯拉提出長達九頁的問題,希望釐清自動駕駛的緊急剎車與自動導航是否有任何缺陷。

特斯拉 Autopilot 與 Google 自駕小車有什麼差別?
目前兩家推動自動駕駛較出名的特斯拉和 Google,從一開始就走向不同的技術分歧點。
美國公路交通安全局把自動導航系統分成五級,從 0 到 4 分別為「無自動化」、「特定功能的自動化」、「組合功能的自動化」、「有限度無人駕駛自動化」與「完全無人駕駛自動化」。
已經上路的特斯拉被分在第二級:擁有至少兩項可協作降低駕駛壓力的功能,能協助駕駛讓車輛安全地保持在車道上,並根據交通路況調整車速。而還在實驗中的 Google 自動駕駛計畫,則是以第四級為目標,希望完全撇除人為的因素,車內的人只需乖乖當個乘客。
其實 Google 是在 2013 年一次實驗後才下定決心開發全自動駕駛,他們驚訝發現隨行工程師們太過信任機械,上路五分鐘後就開始放空,玩手機甚至打瞌睡。看到人們如何濫用技術而不顧看路的警告,Google 決心拆掉剎車、油門與方向盤,並把車子最高速度限制在時速 40.2 公里。
特斯拉的系統和左手一樣只是輔助
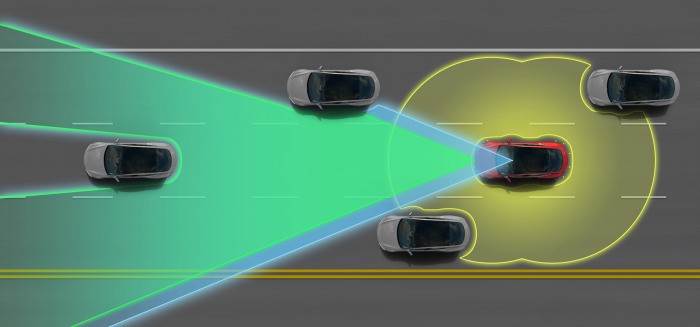
特斯拉的技術比起自動駕駛,更適合定義為自動導航系統,大致包含以下設備:負責辨識車輛和車道的前視鏡頭、追蹤前方車輛距離的毫米波雷達、負責感應周圍車輛與障礙的 12 個超音波感應雷達( 感測範圍 4.8 公尺)、電子輔助剎車系統,以及 GPS 定位與即時交通製圖系統。
現在特斯拉的技術來自以色列 Mobileye,BMW、賓士、豐田和 Volvo 等國際車廠都採用他們的系統。該公司也強調他們的駕駛者輔助系統(DAS),只能「輔助人類駕駛」,而不能真正「取代駕駛」。
類似的系統早在 1980 年代就已誕生,當時美國國防高等研究技術署邀請眾多大學團隊,投入基於視覺導航的自動駕駛系統研究,並打造出第一台用雷達、電腦圖像與自動機器化控制的「自動導航車」。
而這套系統的缺陷在死亡車禍中一覽無遺。美國非營利組織自動駕駛研究中心(CAR)的交通系統分析組總監理查.華萊士( Richard Wallace)解釋,攝影機就像人的眼睛一樣容易在夜晚或大霧中看不清,而雷達雖能偵測物體的遠近,但無法判斷形狀與尺寸。
當貨櫃車的亮白顏色使負責看路的攝影機「瞎了」,挑高的形狀讓雷達「誤判」為高架路牌而排除剎車機制,駕駛可能又走神,意外就這麼發生了。
Google 高精準度的超級天線
Google 的自動駕駛系統架構上與特斯拉大同小異,都有感應器、地圖繪製技術和軟體系統,但 Google 自駕小車車頂上像警示燈的小柱子就是最大差異,那是一台介於攝影機與雷達,能同時偵測距離與物體的雷射雷達(LiDAR)。
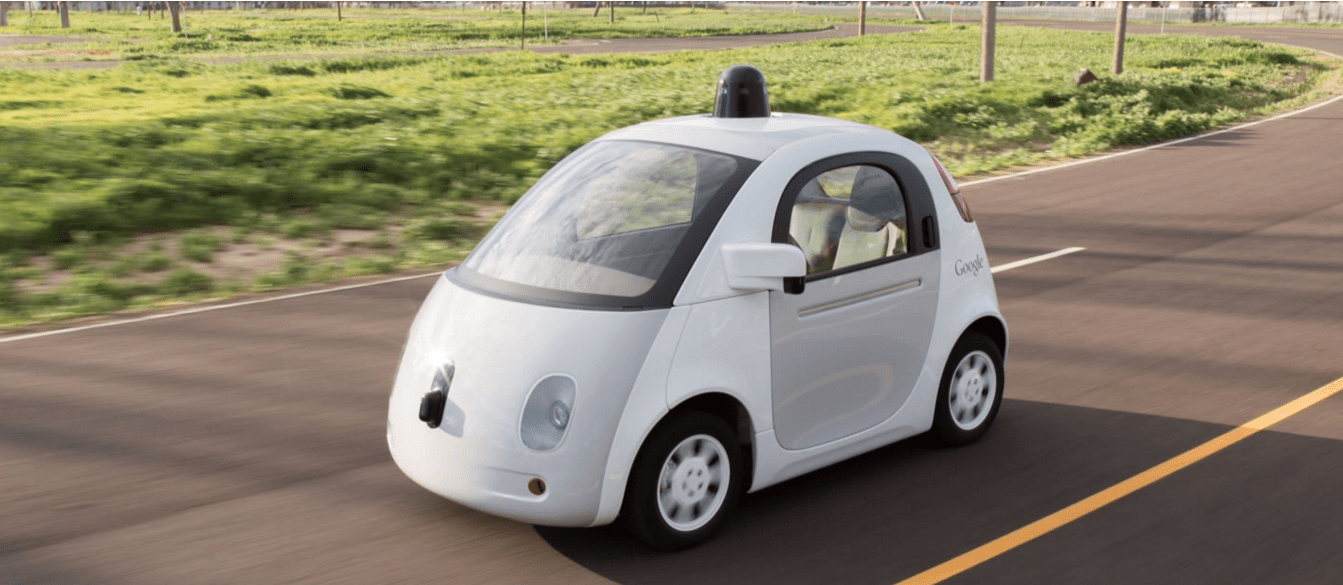
這個 64 層光束 LiDAR 比毫米波雷達具有更高的解析度和速度偵測能力,可透過雷射即時且正確地描繪 60 公尺範圍內的 360 度全景地圖,並把車輛定位在地圖上,誤差僅在幾公分內。
LiDAR 的描繪極為精準,可分辨距離 1 公里以上的兩個相距 10 公分的物體究竟是並排走的路人還是自行車騎士,再結合機器學習技術預測他們的動向,還能解讀自行車騎士準備轉彎的手勢等,做個更優質友善的道路駕駛員。此外還有探測性能不受物體材質形狀影響、不會受電磁波干擾、不因光線過曝或不足影響結果,且高速移動下仍可應用。
雖然 3D LiDAR 不是萬能,還是會受下雨、下雪及大霧等視線不良天氣影響。但這樣高精準度的系統,為什麼馬斯克會認為對於車子而言「不怎麼合理」?
理由可能有三:價格昂貴,Google 的 LiDAR 一個就要 7 萬美元(約 224 萬台幣),幸好現在已有 250 美元,偵測範圍達 40 公尺的平價版 LiDAR 誕生;再來是資料量龐大,Google 的 LiDAR 每秒會產生約 130 萬筆偵測資料,普通嵌入式運算系統難以負荷,但你大概不會想在車上放台專用主機;最後就是硬體體積較大,難以收納在車體,影響美觀,這些也都是 Google 自動駕駛車商業化前必須跨過的門檻。

再完善的科技都無法預測人類的行為
其實每一種感應器都有缺點,演算法或人工智慧也都有其不足處,目前行駛超過 241 萬公里的 Google 無人車也在 2016 年 2 月因為「誤解」巴士司機的意圖而發生輕微擦撞。自動駕駛技術就像當年的飛機一樣,在經過多年的測試後,終究得首次開始載客,實際找出更多需要解決的問題。
讓科技投入實用只能算成功一半,另一半的門檻是如何讓科技不被人類誤用。「車輛的科技能如預期一般運作還不夠,」安全街道自駕聯盟(Self-Driving Coalition for Safer Streets)的領導者大衛.斯特里克蘭(David Strickland)指出,評估安全的指標還包含科技可能被誤用到什麼程度,公司又該如何建立相對應的防護機制,如特斯拉就為駕駛可能放開方向盤的情況設置警告系統。
但你無法想像用戶的腦洞有多大,永遠都有意想不到的使用方式。批評者認為特斯拉 Level 2 自動導航技術最大的問題,就是會讓駕駛誤以為車子可以自動行駛而放鬆注意力,美國《消費者報告》表示要叫「autopilot」這個名稱還太早了,期盼特斯拉更名,最好直接關閉測試版。而特斯拉發言人則反駁「Autopilot」系統經過數百萬英里的內部測試,已證實比沒有輔助情況的駕駛更加安全,而公司的決策會依照真實世界的數據,而不是媒體預測。
針對特斯拉的交通事件,美國高速交通安全管理局正在研擬更詳細的自動駕駛技術準則。所有車輛都裝上自動駕駛系統,可互相溝通的那一天來臨前,人們應更謹慎地使用這項尚未成熟的技術,不要輕易把「輔助用」當作「全自動」來使用,畢竟在道路上高速行駛的車子出了什麼差錯,可能被波及的人數非常廣。
根據世界衛生組織 2012 年的調查,「道路交通事故」位居全球十大死因排行榜第九名,比因高血壓心臟病的死亡人數還多,而《2015年全球道路安全現狀報告》指出,去年仍有約 125 萬人死於道路交通事故。
參考資料:
- What is the difference between Tesla’s Autopilot system and Google’s driver-less car?
- Lidar: the self-driving technology that could help Tesla avoid another tragedy
- Tesla and Google Take Different Roads to Self-Driving Car
- In drive toward autonomous vehicles, will Tesla or Google pull ahead of competition?
- 连遭“挫折”的特斯拉,即将向 Google 偷师
- 實現高精度360度全景偵測 3D LiDAR提高車輛自動化性能










留言討論