


為自駕沙盒暖身示範,自駕小巴WinBus彰濱試跑囉!

還記得台灣第一台 MIT 自研自製小巴 WinBus,八月底在經濟部首度發表嗎?今年九月財團法人車輛研究測試中心(ARTC,即車輛中心)在鹿港彰濱工業區舉辦「WinBus 自駕小巴 足鹿彰濱」體驗會,邀請大家到鹿港搶先試乘這台造價4000萬台幣的自駕車,並順道一探其開發基地。
本次 WinBus 試乘路線是由彰濱工業區的車輛中心至台灣玻璃館,約 2.2 公里路程。雖然工業區內車輛不多,但仍有大貨車與聯結車。車輛中心也特地安排「行人突然衝出」的橋段,WinBus行駛時速約 25-30 公里,到底在發生緊急情況時會如何應對呢?

感測超靈敏,小草也逃不過
一般來說,後方、側方及下方是駕駛者的視線死角,但WinBus的感測系統(「AI」能協助道上的物件辨識、「光達」能鑑別物件的精確距離、「雷達」能偵測物件移動的速度)解決了這項窘境,讓駕駛者只要透過車內的兩個螢幕掌握即時感測資訊,就能心無旁鶩的享受舒適的遊艇內裝!
- 光達合成影像:解析度較低,能標示出路障。
- 實景攝影機:解析度較高,能經由AI辨識標示出車輛與道路障礙訊息。
舉例來說,WinBus保險桿下方的短距離光達,能偵測超過20公分以上的物體;雷達則是能偵測物件的移動速度與方向,提供做出繞開或停止的指令。每個感測器各司其職,360度環景偵測鄰近物件移動,保障行車安全。

在試駕時,靈敏的感測系統發生一段意外的小插曲。WinBus不知怎地忽然急煞,「啊!」,頓時車上站立的所有人都往前撲,一個壓一個,嚇了我一大跳。
原來是彰濱工業區鄰近海邊,風勢強勁,導致分隔島上的草被吹到車道上,影響了感測系統的判斷。

但為了小草停下來似乎有些大驚小怪?面對我們的疑惑,車輛中心董事長黃隆洲表示,「一般車子掃到路旁的草不會停,不過目前 WinBus 的決策系統是設定比較笨的模式,只要遇到問題就停下來,但這是可以設定的,未來能先識別物件,再決定是否要停下來。」
自駕車優點就是能將每台車所遇到的道路情境與問題整合,並同步給其他自駕車來更新感知和決策內容,儘管我們無法保證自駕車百分之百不會出狀況,但有了這些記錄同步,就不容易「重蹈覆轍」。
「真的只有到路上跑,才知道問題」,黃隆洲表示,有了這個經驗,可用 AI 訓練感知和決策系統,下次WinBus 遇到草後就不會突然停下來了。
行人衝出怎麼停?安全過關
WinBus 最刺激的一刻,莫過於測試行進中行人擋在車前,車子的反應是否即時。但是受限於但如果你是靜止障礙物的後方,像是電線桿,並在距離車子不到 1 公尺時跑出來,以時速 30 公里的車來說是絕對是煞不住。
溫馨叮嚀:面對自駕車時,仍要記得它還是一輛可以撞傷人的車(這次只是示範、示範!一般人可別模仿啊!)
WinBus 如何面對行人任意穿越馬路的情形呢?(影片拍攝/簡鈺璇)
WinBus 的感測系統會依據車速決定安全距離,即車速越快,則安全距離越長。一旦行人進入安全距離內,就會減速。
其實這就與我們平時身為駕駛者的防衛駕駛觀念相同,但車內情形又是如何?讓我們繼續看下去。
行人任意穿越馬路,WinBus緊急剎車。(影片拍攝/簡鈺璇)
行人距離不到 1 公尺迎面而來,車子當時時速大約 10 公里,感覺不快的時速,自駕車非常快捷的緊急煞車卻造成車內乘客因為慣性而重心不穩。現場小看急威力,試圖捕捉「人擋車」畫面的記者們都往前撲了下。
WinBus 在這種情況下,為了確保安全,可以說是煞好煞滿。

不過,目前 WinBus 的決策方式並不多,僅有行駛、遇障礙繞道或煞停等模式。若是遇到較為複雜的場景,像是酒駕車輛的花式追撞,就可能無法做出適當應對。換句話說,如果未來能把其他車輛可能過失的情況也列入考量,就有可能避免不少車輛追撞的憾事。
另外,若要提出供多元化的決策,車輛中心總經理廖慶秋表示除了自駕車本身的感測裝置,還需仰賴道旁設備、其他自駕車輛提供相關資訊(如車速異常資訊)。因此,WinBus 與地方政府合作,投資裝設道旁設備。
現在彰濱工業區的部分路段已裝能用 DSRC(Dedicated Short Range Communications,專用短程通信技術)連線的紅綠燈裝置,將燈號訊息傳給 WinBus 做決策。在面對未裝有 DSRC 的號誌時,WinBus 則以攝影機辨識燈號。
自駕車也要反覆練習開車
自駕車在實際上路之前,需不斷測試,直到通過道路駕駛模擬器的考驗。就設計邏輯來說,這和機師訓練所使用的飛行模擬器相去不遠,惟訓練對象不同:一個是人(機師),另一個則是車子(自駕車)。
而且本套模擬器系統能導入自駕車的感測器模型、決策演算法模型及道路環境模型,讓自駕車進行模擬駕駛時,相當有真實感。工程人員只要在一旁盯著車子按油門、踩剎車的狀況,便能知道車子的問題。
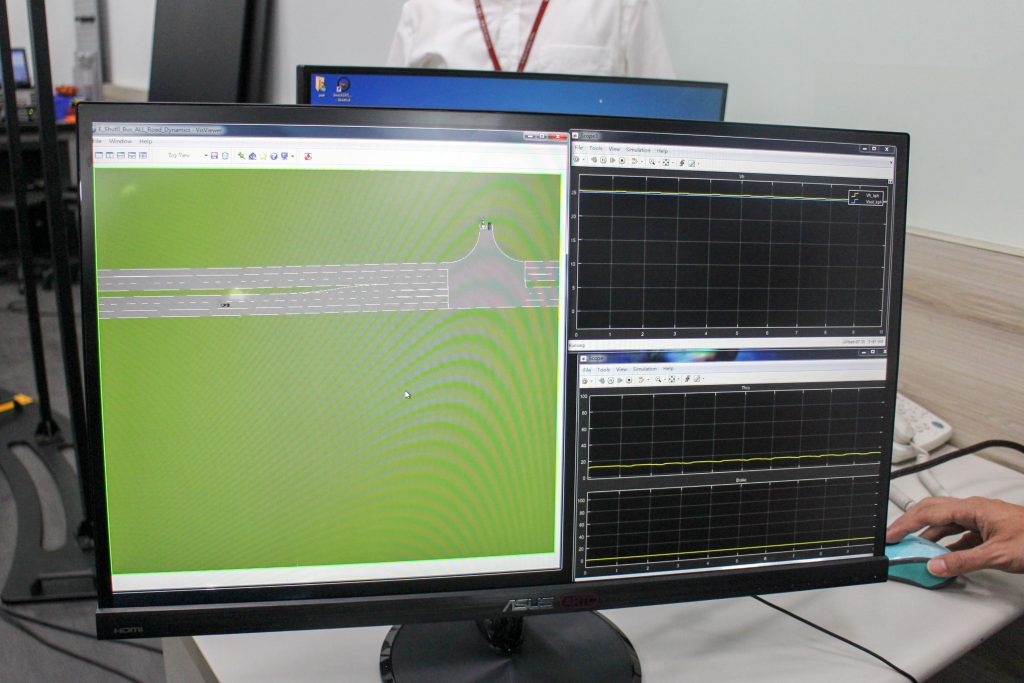
此外,模擬器還能動態模擬車輛的加速與煞車,模擬器上頭的座位可以讓乘客感受自駕車開車時的乘車體驗。廖慶秋表示,模擬器能讓車子在跑未知路線前,先試走看看熟悉道旁的狀況,增加行駛的安全性,甚至於累積數據提升乘客舒適度。

WinBus 帶動台灣的自駕車產業
由於市場因素,台灣在傳統車業要打入一級車廠佔有一席之地相當難以達成,廖慶秋表示,自駕車是有希望的,台灣在價格與技術上都有競爭力。
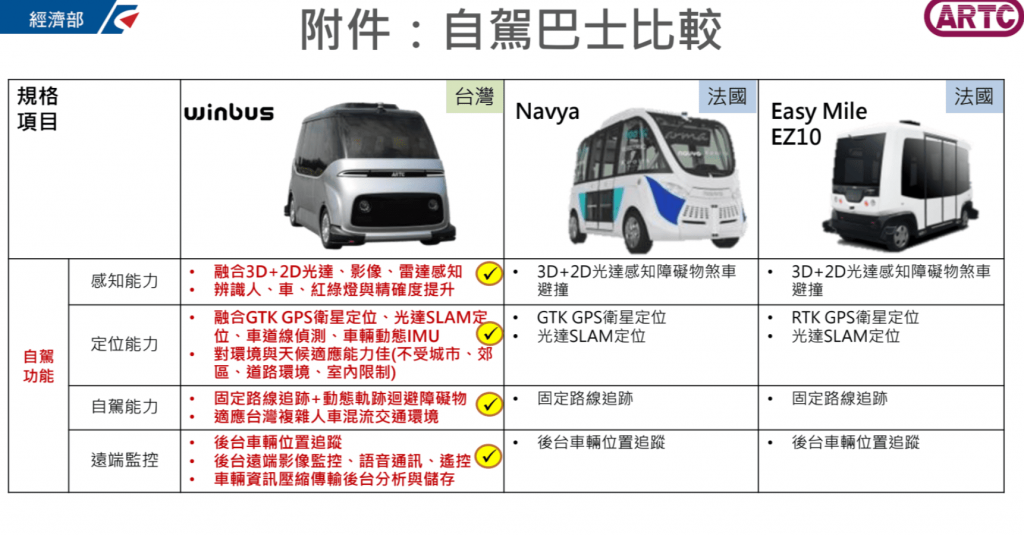
根據 ARTC 的資料,WinBus 的自駕功能不輸法國公司的著名自駕小巴 Navya、EZ10。在感知能力上,WinBus 加入影像與 3D+2D 光達做感知融合;定位上,除了光達與衛星定位外,增加車道線偵測、車輛動態IMU,達到自駕車所需要 20 公分級的定位精確度,且不受天候的影響;自駕能力部分,在固定路線追跡之外,亦加入動態軌跡迴避障礙物,得以適應台灣複雜人車混流的交通環境(參照下方表格)。
車輛中心協理翁國樑表示,用台灣的 ICT 優勢,開發自駕次系統,建構相關產業的生態系,促使車輛產業轉型,以零組件、次系統、服務模式外銷國際列為終極目標。
我也想試乘,該怎麼做呢?
經濟部將在今年底開放廠商申請自駕小巴的沙盒運行計畫
車輛中心、彰化縣政府以及即將投入彰濱工業區營運的勤崴國際三方共同簽署 MOU,期能推動「彰濱鹿港」作為沙盒自駕運行的首發場域,因此 WinBus 會積極爭取,拿到第一張自駕小巴試車牌。
勤崴國際董事長柯應鴻表示,鹿港每年觀光人次高達 900 萬人,彰濱工業區觀光工廠,如:玻璃博物館、緞帶王、白蘭氏健康博物館,每年有 150 萬觀光人次,是條值得開發的觀光路線。
藉由將智慧接駁導入彰濱鹿港,自駕車可以實際驗證,亦能與在地觀光發揮加成效應。若 WinBus 能順利拿到自駕車牌,大家最快在明年初就可以搭它遊鹿港囉!

關於作者
|
|
PanX 泛科技PanX 泛科技從科技議題著手,企圖把未來更清楚地描繪出來。從能源議題、金融科技、生物科技,到物聯網、大數據、工業4.0、自造者,都是我們專注的內容。本帳號也會發布來自其他單位提供的新聞稿。 |






留言討論