


跟著你的感覺動此動!HERMES機器人不需要人工智慧也能很聰明

機器人雖然能代替人類做很多事,但終究無法取代人類,其中一個很重要的因素就是-機器人沒有人類般的大腦。目前,許多機器人都在開發人工智慧系統,但那終究是模仿與演算後的結果,為何不直接使用人類大腦呢?別緊張,並不是說要把人類大腦直接移植到機器人身上(這也太科幻了),而是像電影《鋼鐵擂台》一樣,透過觸覺裝置,直接利用人類的大腦和身體來遙控機器人!
HERMES,是由 MIT 仿生機器人實驗室的教授 Sangbae Kim 和他的團隊,所開發的一款災害應變機器人,以獵豹(Cheetah)機器人為基礎,但並非四足機器人,而是能像人一樣站立和使用雙臂。這款機器人約 45 公斤重,體積大概是一般人類的 9 成大小,可與人類周遭環境自然的互動,並具有特製的高扭矩密度電動執行器,以進行衝刺和跳躍的動作。
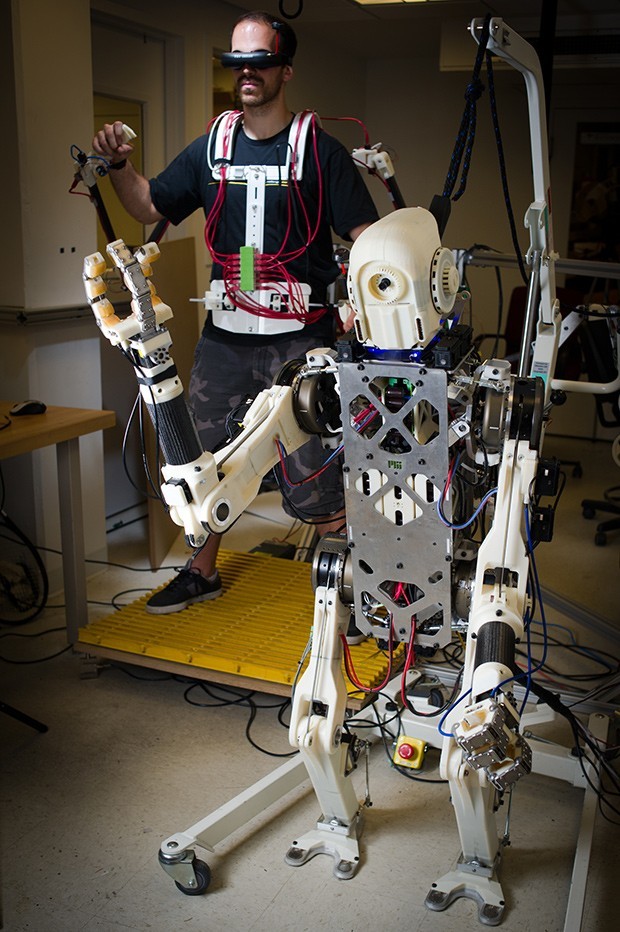
除了機器人本身的構造外,系統和控制介面更是使它如此特別的關鍵。HERMES 的頭部安裝了攝影機,讓操控者可以第一視角直接控制機器人的手臂和握爪。使用的控制介面為平衡反饋介面(Balance Feedback Interface,簡稱 BFI),這是一種力反饋傳動帶,提供操控者機器人足部對地面的反作用力,再利用操控者的動作來平衡機器人。
舉例來說,如果機器人開始傾斜,BFI 的馬達便會將操控者推向相同方向,操控者自然而然會使自己保持直立,而這個反饋的作用力會讓機器人也能繼續保持直立狀態。目前測試的初步結果顯示,這個介面的確能夠運作,但研究團隊還需要進一步確定其運作的效率,例如操控者可以在多遠的範圍內同步自己和機器人身上的馬達。
除此之外,整個操作過程並沒有任何視覺輸入,也就是說,對機器人來說,每個動作都是無意識的狀況下被「控制」出來。在速度上來說,比起操控者利用視覺去校正機器人的平衡,利用人類反射的感應方式是前者的 2 到 3 倍速度快。研究人員認為,這個系統最終或許可以發展成「全身同步化的意識」,讓遙控輪式機器人的性能更貼近真實的人類。
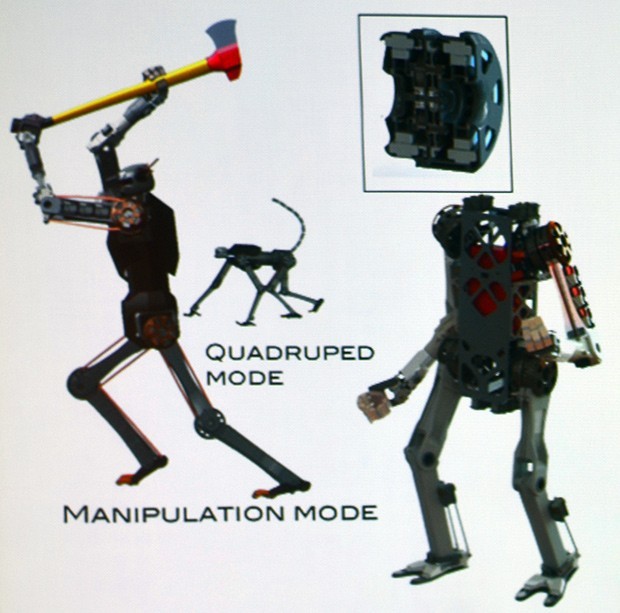
團隊的下一步是要將 BFI 擴展成 6 DOF,移除操控者臀部動作所帶來的限制,並將機器人手臂運動也納入平衡策略,提供慣性以抵制干擾影響操控者。但若雙臂的平衡無法奏效,則會讓 HERMES 由兩足機器人轉換回四足機器人,沿用原本的操控方式。

不過危機就是轉機,雙臂平衡計畫的失敗也可能會導致另一種未來發展:產生獵豹和 HERMES 的混合體,既可以四足運動也能夠雙足站立、平衡和執行任務。到底接下來會如何發展呢?就讓我們繼續期待吧~
參考資料:
MIT Robot Steals Human Brains to Help It Balance [spectrum.ieee.org]
照片出處:spectrum.ieee.org





留言討論